Click to see all publications on Google Scholar
[C] = Conference, [J] = Journal, [W] = Workshop
2023

C. L. Nelson and D. S. Drew, “High Aspect Ratio Ducted Electroaerodynamic Thrusters for Micro Air Vehicle Propulsion,” IEEE Robotics and Automation Letters (under review). [J]
Abstract
Electroaerodynamic propulsion, where force is produced through collisions between electrostatically accelerated ions and neutral air molecules, is an attractive alternative to propeller- and flapping wing-based methods for micro air vehicle (MAV) flight due to its silent and solid-state nature. One major barrier to adoption is its limited thrust efficiency at useful disk loading levels. Ducted actuators comprising multiple serially-integrated acceleration stages are a potential solution, allowing individual stages to operate at higher efficiency while maintaining a useful total thrust, and potentially improving efficiency through various aerodynamic and fluid dynamic mechanisms. In this work, we investigate the effects of duct and emitter electrode geometries on actuator performance, then show how a combination of increasing cross-sectional aspect ratio and serial integration of multiple stages can be used to produce overall thrust densities comparable to commercial propulsors. An optimized five-stage device attains a thrust density of about 18 N/m2 at a thrust efficiency of about 2 mN/W, among the highest values ever measured at this scale. We further show how this type of thruster can be integrated under the wings of a MAV-scale fixed wing platform, pointing towards future use as a distributed propulsion system.
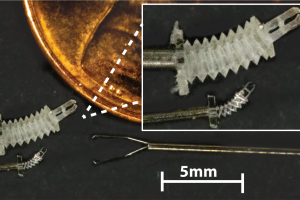
A. Leavitt, R. Lam, N. C. Taylor, D. S. Drew, and A. Kuntz, “Toward a Millimeter-Scale Tendon-Driven Continuum Wrist with Integrated Gripper for Microsurgical Applications,” Hamlyn Symposium on Medical Robotics, 2023 [C]
Abstract
Microsurgery, wherein surgeons operate on extremely small structures frequently visualized under a microscope, is a particularly impactful yet challenging form of surgery. Robot assisted microsurgery has the potential to improve surgical dexterity and enable precise operation on such small scales in ways not previously possible. Clinical applications of microsurgery include intraocular surgery, fetal surgery, otology, laryngeal surgery, neurosurgery, and urology. Intraocular microsurgery is a particularly challenging domain. Challenges arise, in part, due to the lack of dexterity that is achievable with rigid instruments inserted through the eye. The insertion point introduces a remote center of motion constraint that prevents control over a tool-tip’s full position and orientation for conventional, straight instruments. Continuum robots based on concentric tubes, magnetic actuation, and tendon-actuated stacked disks have been proposed for intraocular microsurgery to overcome this constraint, but are frequently limited in their local curvatures—an important consideration in constrained spaces. Further the radius of curvature achievable by such devices is relatively limited, as of now (27 mm). To take steps toward overcoming limited local curvature, we present a new design for a millimeter-scale, dexterous tendon-driven continuum wrist and gripper, intended for microsurgery applications. The device is created via a state-of-the-art two-photon-polymerization (2PP) microfabrication technique. The 2PP 3D printing method enables construction via a flexible material, with complex internal geometries and critical features at the micron-scale.
2021
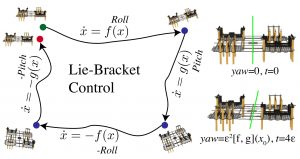
N. O. Lambert, C. B. Schindler, D. S. Drew, and K. S. J. Pister, “Nonholonomic Yaw Control of an Underactuated Flying Robot With Model-Based Reinforcement Learning,” IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 455–461, Apr. 2021, doi: 10.1109/LRA.2020.3045930. [J]
Abstract
Nonholonomic control is a candidate to control nonlinear systems with path-dependant states. We investigate an underactuated flying micro-aerial-vehicle, the ionocraft, that requires nonholonomic control in the yaw-direction for complete attitude control. Deploying an analytical control law involves substantial engineering design and is sensitive to inaccuracy in the system model.With specific assumptions on assembly and system dynamics, we derive a Lie bracket for yaw control of the ionocraft. As a comparison to the significant engineering effort required for an analytic control law, we implement a data-driven model-based reinforcement learning yaw controller in a simulated flight task. We demonstrate that a simplemodel-based reinforcement learning framework can match the derived Lie bracket control – in yaw rate and chosen actions – in a few minutes of flight data, without a predefined dynamics function. This letter shows that learning-based approaches are useful as a tool for synthesis of nonlinear control laws previously only addressable through expert-based design.
D. S. Drew, “Multi-Agent Systems for Search and Rescue Applications,” Curr Robot Rep, vol. 2, no. 2, pp. 189–200, Jun. 2021, doi: 10.1007/s43154-021-00048-3. [J]
Abstract
The goal of this review is to evaluate the current status of multi-robot systems in the context of search and rescue. This includes an investigation of their current use in the field, what major technical challenge areas currently preclude more widespread use, and which key topics will drive future development and adoption.
![]()
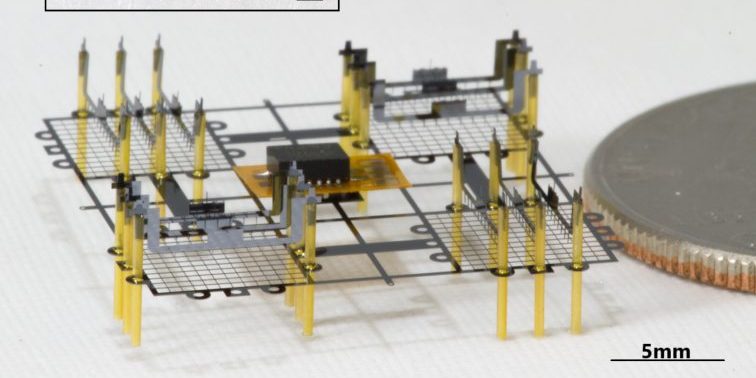
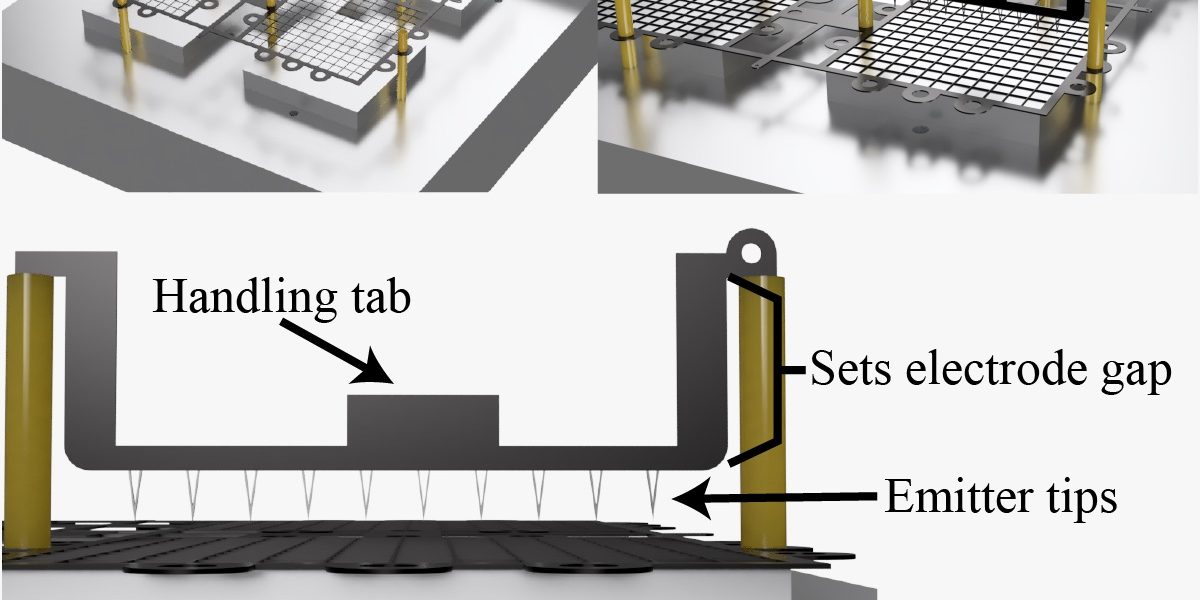
D. S. Drew and S. Follmer, “High Force Density Multi-Stage Electrohydrodynamic Jets Using Folded Laser Microfabricated Electrodes,” Transducers 2021, Available: https://arxiv.org/abs/2107.03567v1 [C]
Abstract
The electrohydrodynamic (EHD) force produced by ions ejected from a corona plasma is a solid state, silent mechanism for accelerating air, useful for applications ranging from electronics cooling to flying microrobots. This paper presents the theoretical motivation and the first implementation of a multi-stage, highly miniaturized EHD device, which can provide both improved absolute power output and power density as compared to single-stage devices. A laser microfabricated, folded electrode design reduces component count and assembly time. Data from one, two, and three-stage devices demonstrates a near linear scaling of output force with stage count, indicating inter-stage ducting successfully reduces losses. Device lifetime is assessed to validate the use of stainless-steel emission electrodes. Areal thrust, force density, and volumetric power density for the three-stage device are among the highest ever measured from an EHD actuator.
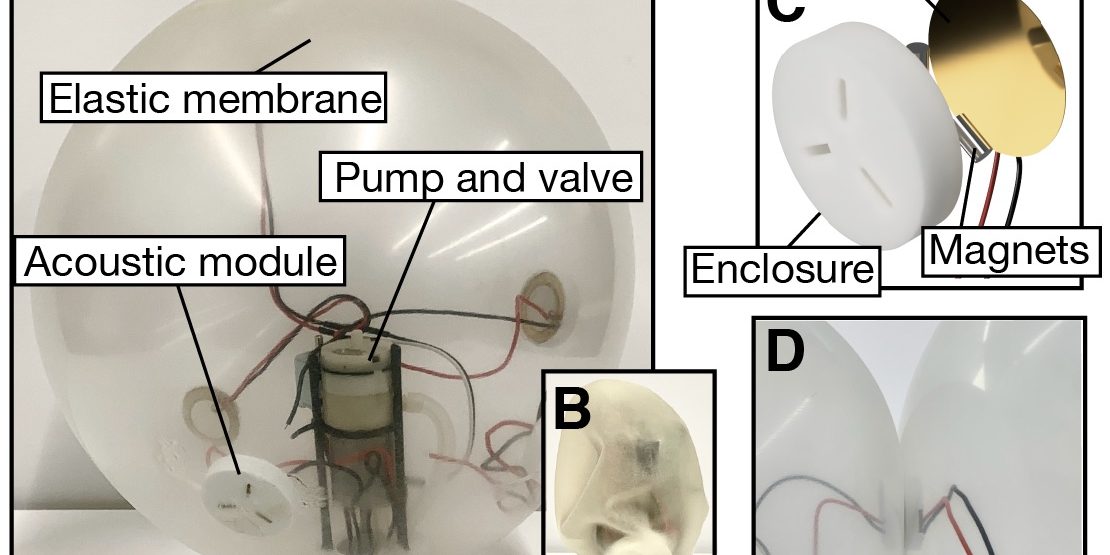
D. S. Drew, M. Devlin, E. Hawkes, and S. Follmer, “Acoustic Communication and Sensing for Inflatable Modular Soft Robots,” ICRA 2021. Available: http://arxiv.org/abs/2101.11817 [C]
Abstract
Modular soft robots combine the strengths of two traditionally separate areas of robotics. As modular robots, they can show robustness to individual failure and reconfigurability; as soft robots, they can deform and undergo large shape changes in order to adapt to their environment, and have inherent human safety. However, for sensing and communication these robots also combine the challenges of both: they require solutions that are scalable (low cost and complexity) and efficient (low power) to enable collectives of large numbers of robots, and these solutions must also be able to interface with the high extension ratio elastic bodies of soft robots. In this work, we seek to address these challenges using acoustic signals produced by piezoelectric surface transducers that are cheap, simple, and low power, and that not only integrate with but also leverage the elastic robot skins for signal transmission. Importantly, to further increase scalability, the transducers exhibit multi-functionality made possible by a relatively flat frequency response across the audible and ultrasonic ranges. With minimal hardware, they enable directional contact-based communication, audible-range communication at a distance, and exteroceptive sensing. We demonstrate a subset of the decentralized collective behaviors these functions make possible with multi-robot hardware implementations. The use of acoustic waves in this domain is shown to provide distinct advantages over existing solutions.
2020
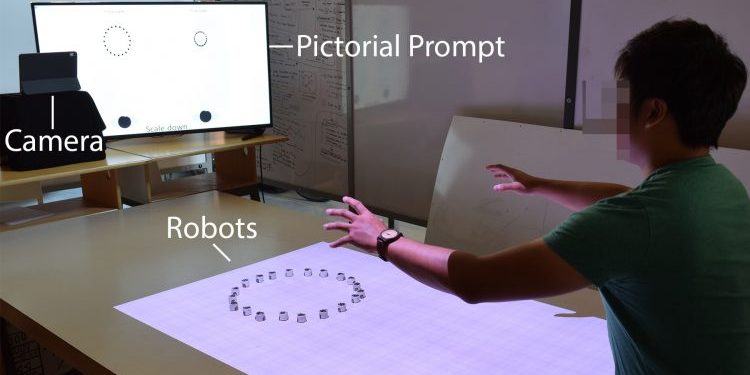
L. H. Kim, D. S. Drew, V. Domova, and S. Follmer, “User-defined Swarm Robot Control,” in Proceedings of the 2020 CHI Conference on Human Factors in Computing Systems, Honolulu, HI, USA, Apr. 2020, pp. 1–13. doi: 10.1145/3313831.3376814. [C]
Abstract
A swarm of robots can accomplish more than the sum of its parts, and swarm systems will soon see increased use in applications ranging from tangible interfaces to search and rescue teams. However, effective human control of robot swarms has been shown to be demonstrably more difficult than controlling a single robot, and swarm-specific interactions methodologies are relatively underexplored. As we envision even non-expert users will have more daily in-person encounters with different numbers of robots in the future, we present a user-defined set of control interactions for tabletop swarm robots derived from an elicitation study. We investigated the effects of number of robots and proximity on the user’s interaction and found significant effects. For instance, participants varied between using 1-2 fingers, one hand, and both hands depending on the group size. We also provide general design guidelines such as preferred interaction modality, common strategies, and a high-agreement interaction set.
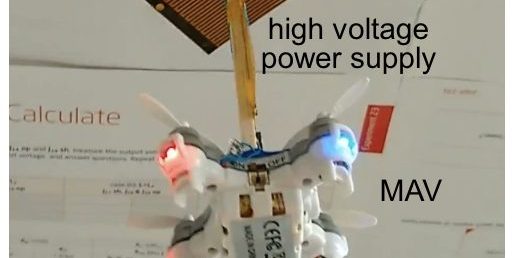
S. Park, D. S. Drew, S. Follmer, and J. Rivas-Davila, “Lightweight High Voltage Generator for Untethered Electroadhesive Perching of Micro Air Vehicles,” IEEE Robotics and Automation Letters, vol. 5, no. 3, pp. 4485–4492, Jul. 2020, doi: 10.1109/LRA.2020.3001520. [J]
Abstract
The limited in-flight battery lifetime of centimeterscale flying robots is amajor barrier to their deployment, especially in applications which take advantage of their ability to reach high vantage points. Perching, where flyers remain fixed in space without use of flight actuators by attachment to a surface, is a potential mechanism to overcome this barrier. Electroadhesion, a phenomenon where an electrostatic force normal to a surface is generated by induced charge, has been shown to be an increasingly viable perching mechanism as robot size decreases due to the increased surface-area-to-volume ratio. Typically electroadhesion requires high (>1 kV) voltages to generate useful forces, leading to relatively large power supplies that cannot be carried on-board a micro air vehicle. In this letter, we motivate the need for application-specific power electronics solutions for electroadhesive perching, develop a useful figure of merit (the “specific voltage”) for comparing and guiding efforts, and walk through the design methodology of a system implementation.We conclude by showing that this high voltage power supply enables, for the first time in the literature, tetherless electroadhesive perching of a commercial micro quadrotor.
2019
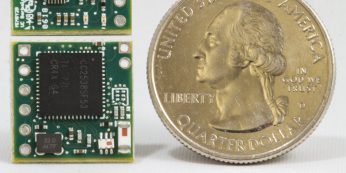
C. B. Schindler, D. S. Drew, B. G. Kilberg, F. M. R. Campos, S. Yanase, and K. S. J. Pister, “MIMSY: The Micro Inertial Measurement System for the Internet of Things,” in 2019 IEEE 5th World Forum on Internet of Things (WF-IoT), Apr. 2019, pp. 329–334. doi: 10.1109/WF-IoT.2019.8767232. [C]
Abstract
The Micro Inertial Measurement System (MIMSY) is an opensource wireless sensor node for Internet of Things applications, specifically designed for a small system volume while maintaining functionality and extensibility. MIMSY is a 16mm 16mm node with an Arm Cortex-M3 microprocessor, 802.15.4 wireless transceiver, and a 9-axis IMU. The system is fully compatible with the OpenWSN wireless sensor networking stack, which enables the straightforward implementation of standardscompliant 6TiSCH mesh networks using MIMSY motes. While the application space of MIMSY is quite vast, we present three sample implementations showcasing the opportunities afforded by a small and relatively low-cost mote with mesh networking and inertial measurement capabilities, including: high granularity areal sensing for sleep monitoring with motes embedded in a foam mattress; high reliability, low latency communication for industrial process automation and control; and long lifetime physical event detection and activity monitoring with minimal setup time.
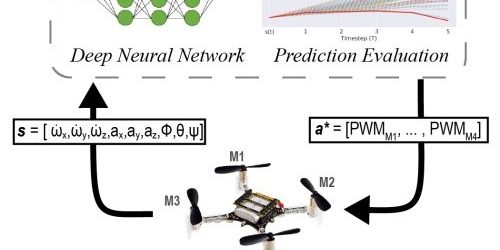
N. O. Lambert, D. S. Drew, J. Yaconelli, S. Levine, R. Calandra, and K. S. J. Pister,
“Low-Level Control of a Quadrotor With Deep Model-Based Reinforcement Learning,” IEEE Robotics and Automation Letters, vol. 4, no. 4, pp. 4224–4230, Oct. 2019, doi: 10.1109/LRA.2019.2930489. [J]
Abstract
Designing effective low-level robot controllers often entail platform-specific implementations that require manual heuristic parameter tuning, significant system knowledge, or long design times. With the rising number of robotic and mechatronic systems deployed across areas ranging from industrial automation to intelligent toys, the need for a general approach to generating low-level controllers is increasing. To address the challenge of rapidly generating low-level controllers, we argue for using model-based reinforcement learning (MBRL) trained on relatively small amounts of automatically generated (i.e., without system simulation) data. In this letter, we explore the capabilities ofMBRL on a Crazyflie centimeter-scale quadrotor with rapid dynamics to predict and control at ≤50 Hz. To our knowledge, this is the first use of MBRL for controlled hover of a quadrotor using only on-board sensors, direct motor input signals, and no initial dynamics knowledge. Our controller leverages rapid simulation of a neural network forward dynamics model on a graphic processing unit enabled base station, which then transmits the best current action to the quadrotor firmware via radio. In our experiments, the quadrotor achieved hovering capability of up to 6 s with 3 min of experimental training data.
2018
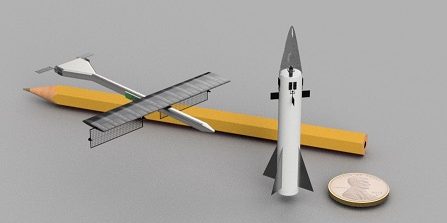
D. S. Drew, N. O. Lambert, C. B. Schindler, and K. S. J. Pister, “Toward Controlled Flight of the Ionocraft: A Flying Microrobot Using Electrohydrodynamic Thrust With Onboard Sensing and No Moving Parts,” IEEE Robotics and Automation Letters, vol. 3, no. 4, pp. 2807–2813, Oct. 2018, doi: 10.1109/LRA.2018.2844461 [J]
Abstract
This letter presents an insect-scale microrobot that flies silently and with no mechanical moving parts, using a mechanism with no analogue in the natural world: electrohydrodynamic thrust produced by ions generated via corona discharge. For the first time, attitude and acceleration data are continuously collected from takeoff and sustained flight of a 2 cm 2 cm, 30 mg “ionocraft” carrying a 37 mg 9-axis commercial IMU on FlexPCB payload, with external tethers for power and data transfer. The ionocraft’s steady-state thrust versus voltage profile, dynamic response to a time-varying signal around a high voltage dc bias point, and aerodynamic drag at incident angles around 90◦ are measured. These experimental measurements, as well asmeasured IMU sensor noise, are inserted into a MATLAB Simulink simulation environment. Simulation shows controlled hovering and planned flight in arbitrary straight trajectories in the XY plane.
D. S. Drew and K. S. J. Pister, “Takeoff of a Flying Microrobot With COTS Sensor Payload Using Electrohydrodynamic Thrust Produced by Sub-millimeter Corona Discharge,” in 2018 Solid-State, Actuators, and Microsystems Workshop Technical Digest, Hilton Head, South Carolina, USA, May 2018, pp. 67–70. doi: 10.31438/trf.hh2018.18. [W]
Abstract
This paper demonstrates the first flying microrobot using electrohydrodynamic thrusters, or ionocraft, to successfully take off while carrying an onboard commercial sensor package. The 13.6mg, 1.8cm by 1.8cm ionocraft is shown to take off while carrying a 40mg Flex PCB with 9-axis IMU and associated passives while tethered to a power supply. A new emitter electrode design has decreased corona onset voltage by over 30% and takeoff voltage by over 20% from previous efforts. Thrust density scaling with increasing numbers of emitter wires, continued geometric scaling for decreased operating voltage, device lifetime improvement via thin film deposition, and new assembly techniques are all explored.
2017
D. S. Drew and K. S. J. Pister, “Geometric Optimization of Microfabricated Silicon Electrodes for Corona Discharge-Based Electrohydrodynamic Thrusters,” Micromachines, vol. 8, no. 5, p. 141, May 2017, doi: 10.3390/mi8050141. [J]
Abstract
Electrohydrodynamic thrust is an emerging propulsion mechanism for flying insect-scale robots. There is a need to both minimize the operating voltage and maximize the output force when designing microfabricated electrodes for use in these robots. In this work, an array of hybrid wire-needle and grid electrode geometries were fabricated and characterized to attempt to minimize both corona discharge onset voltage and thrust loss factor. Statistical analysis of this dataset was performed to screen for factors with significant effects. An optimized emitter electrode decreased onset voltage by 22%. Loss factor was found to vary significantly (as much as 30%) based on collector grid geometric parameters without affecting discharge characteristics. The results from this study can be used to drive further optimization of thrusters, with the final goal of providing a path towards autonomous flying microrobots powered by atmospheric ion engines.
D. S. Drew and K. S. J. Pister, “First takeoff of a flying microrobot with no moving parts,” in 2017 International Conference on Manipulation, Automation and Robotics at Small Scales (MARSS), Jul. 2017, pp. 1–5. doi: 10.1109/MARSS.2017.8001934. [C]
Abstract
The preponderance of research into flying microrobots has focused on biomimetic flight mechanisms. In this work, we demonstrate an insect-scale robot capable of vertical takeoff using electrohydrodynamic thrust, a mechanism with no natural analogue. The 10mg, 1.8cm by 1.8cm “ionocraft” operates at about 2400 volts and has a thrust to weight ratio of approximately 10. Feasibility of using individually addressable thrusters in a quadcoptor-esque manner for attitude control is demonstrated qualitatively. A combination of design choices in the microfabricated silicon electrodes and a machine-fabricated external fixture allow for reproducible hand-assembly of the microrobot.
D. S. Drew, B. Kilberg, and K. S. J. Pister, “Future mesh-networked pico air vehicles,” in 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Jun. 2017, pp. 1075–1082. doi: 10.1109/ICUAS.2017.7991503. [C]
Abstract
Taken together, recent advances in microelectromechanical systems, wireless mesh networks, digital circuits, and battery technology have made the notion of autonomous pico air vehicles viable. In this work we describe the core technologies enabling these future vehicles as well as propose two possible future platforms. We draw on recent research on high thrust density atmospheric ion thrusters, microfabricated silicon control surfaces, and extremely low mass and power mesh networking nodes. Using the same open-source network implementation as we have already demonstrated in larger UAVs, these flying microrobots will open up a new application space where unobtrusiveness and high data granularity are vital.
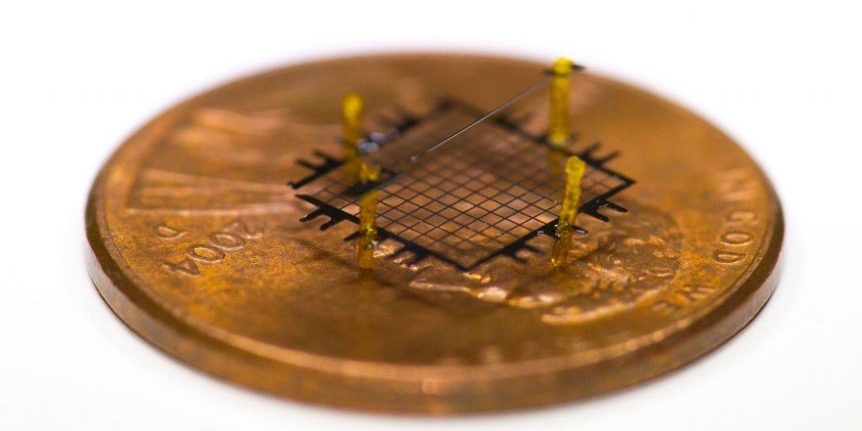
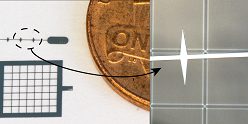
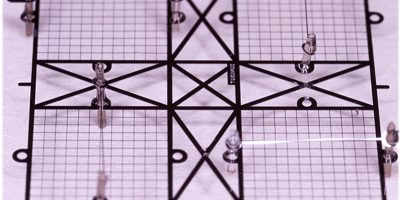
D. Drew, D. S. Contreras, and K. S. J. Pister, “First thrust from a microfabricated atmospheric ion engine,” in 2017 IEEE 30th International Conference on Micro Electro Mechanical Systems (MEMS), Jan. 2017, pp. 346–349. doi: 10.1109/MEMSYS.2017.7863412. [C]
Abstract
The bulk of current research in the realm of pico air vehicles has focused on biologically inspired propulsion mechanisms. In this work we investigate the use of electrohydrodynamic thrust produced by a microfabricated corona discharge device as a mechanism to create flying microrobots with no moving parts. Electrodes of various geometries are fabricated from a silicon-on-insulator wafer with a two mask process. Electrical characterization is performed to analyze the effect of inter-electrode gap and emitter electrode width on corona discharge and compare findings to simulation. Outlet air velocity and thrust are directly measured to analyze the effects of collector electrode geometry on performance. A roughly 100 cubic millimeter, 2.5mg thruster is assembled with a thrust to weight ratio exceeding 20.
![]()
D. S. Contreras, D. S. Drew, and K. S. J. Pister, “First steps of a millimeter-scale walking silicon robot,” in 2017 19th International Conference on Solid-State Sensors, Actuators and Microsystems (TRANSDUCERS), Jun. 2017, pp. 910–913. doi: 10.1109/TRANSDUCERS.2017.7994197. [C]
Abstract
This work presents the locomotion of a ground-based single-legged silicon robot. The robot measures 5mm × 6mm × 0.5mm and weighs 18mg. Fabricated in a siliconon-insulator (SOI) process, the robot is based on electrostatic inchworm motors that drive a 2 degree-of-freedom (DOF) planar silicon linkage that acts as the leg. The leg sweeps out an area of approximately 500μm × 500μm off the edge of the chip. The chip is connected to power and control by long flexible wires which also act to support the robot upright. The robot exerts over 1.5x its weight in the vertical axis, enough to lift its body and push itself forward.